11月8日消息,日前,懂车帝直播黑夜环境下,问界M5和小鹏G6的AEB对静态假车识别测试。
视频中,小鹏G6进行30km/h测试时,完全没有反应,直接撞上了假车,驾驶员踩下刹车才刹停,作为对比,问界M5 EV从30km/h到80km/h全部一次性成功刹停。
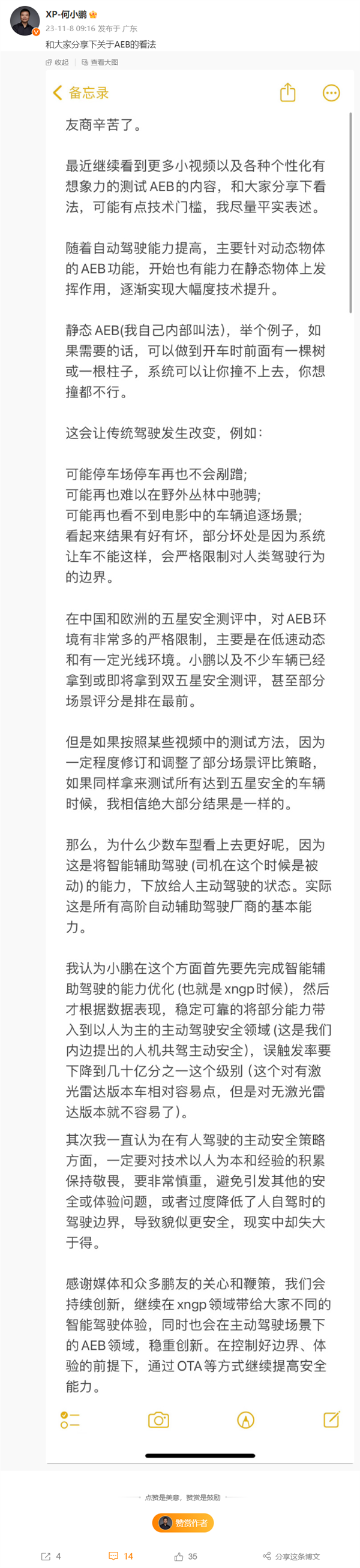
而今日,小鹏汽车董事长何小鹏又发文分享了关于AEB的看法:
友商辛苦了,最近继续看到更多小视频以及各种个性化有想象力的测试AEB的内容,和大家分享下看法,可能有点技术门槛,我尽量平实表述。
随着自动驾驶能力提高,主要针对动态物体的AEB功能,开始也有能力在静态物体上发挥作用,逐渐实现大幅度技术提升。
静态AEB(我自己内部叫法),举个例子,如果需要的话,可以做到开车时前面有一棵树或一根柱子,系统可以让你撞不上去,你想撞都不行。
这会让传统驾驶发生改变,例如:
可能停车场停车再也不会剐蹭;可能再也难以在野外丛林中驰骋;可能再也看不到电影中的车辆追逐场景;
看起来结果有好有坏,部分坏处是因为系统让车不能这样,会严格限制对人类驾驶行为的边界。
在中国和欧洲的五星安全测评中,对AEB环境有非常多的严格限制,主要是在低速动态和有一定光线环境。
小鹏以及不少车辆已经拿到或即将拿到双五星安全测评,甚至部分场景评分是排在最前。
但是如果按照某些视频中的测试方法,因为一定程度修订和调整了部分场景评比策略,如果同样拿来测试所有达到五星安全的车辆时候,我相信绝大部分结果是一样的。
那么,为什么少数车型看上去更好呢,因为这是将智能辅助驾驶(司机在这个时候是被动)的能力,下放给人主动驾驶的状态,实际这是所有高阶自动辅助驾驶厂商的基本能力。
我认为小鹏在这个方面首先要先完成智能辅助驾驶的能力优化(也就是xngp时候),然后才根据数据表现,
稳定可靠的将部分能力带入到以人为主的主动驾驶安全领域(这是我们内边提出的人机共驾主动安全)。
误触发率要下降到几十亿分之一这个级别(这个对有激光雷达版本车相对容易点,但是对无激光雷达版本就不容易了)。
其次我一直认为在有人驾驶的主动安全策略方面,一定要对技术以人为本和经验的积累保持敬畏,要非常慎重。
避免引发其他的安全或体验问题,或者过度降低了人自驾时的驾驶边界,导致貌似更安全,现实中却失大于得。